Outer diameter: 116mm
Length: 147.5mm
Weight: 4.64kg
Max.Torque: 408N·m
Max.Speed: 40RPM
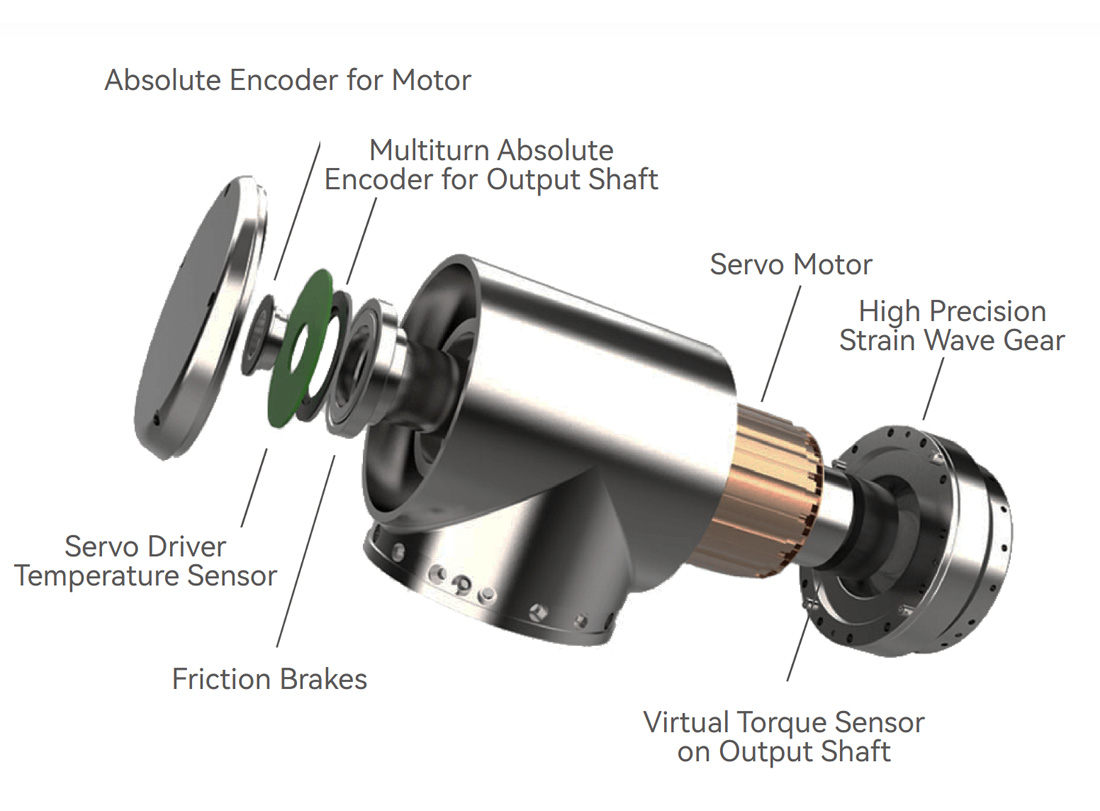
The eRob T-type joint module is a highly integrated all-in-one robotic actuator that combines eight core components, including a servo motor, high-precision harmonic gear reducer, dual absolute encoders, servo drive, friction brake, temperature sensor, and virtual torque sensor. This compact and innovative design eliminates the need for complex external component selection and integration, providing a plug-and-play solution that simplifies robotic system development. It is ideal for high-performance collaborative robots and humanoid robots.
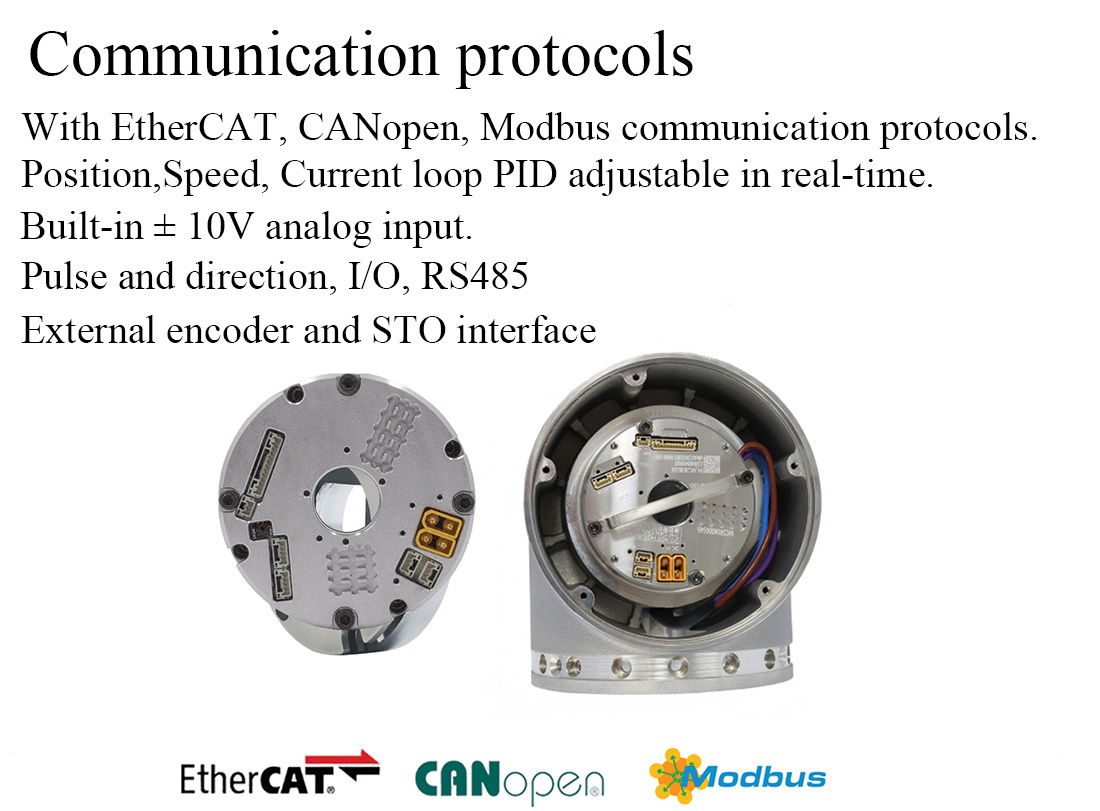
The built-in servo driver supports multiple industrial communication protocols such as EtherCAT, CANopen, and Modbus, ensuring seamless integration with various control systems. It allows real-time adjustment of position, speed, and current loop PID parameters, delivering precise and responsive motion control.
Supports EtherCAT, CANopen, and Modbus communication protocols
Real-time adjustable position, speed, and current loop PID
Built-in ±10V analog input
Supports pulse and direction control, I/O, and RS485 communication
Compatible with external encoder and STO (Safe Torque Off) interface
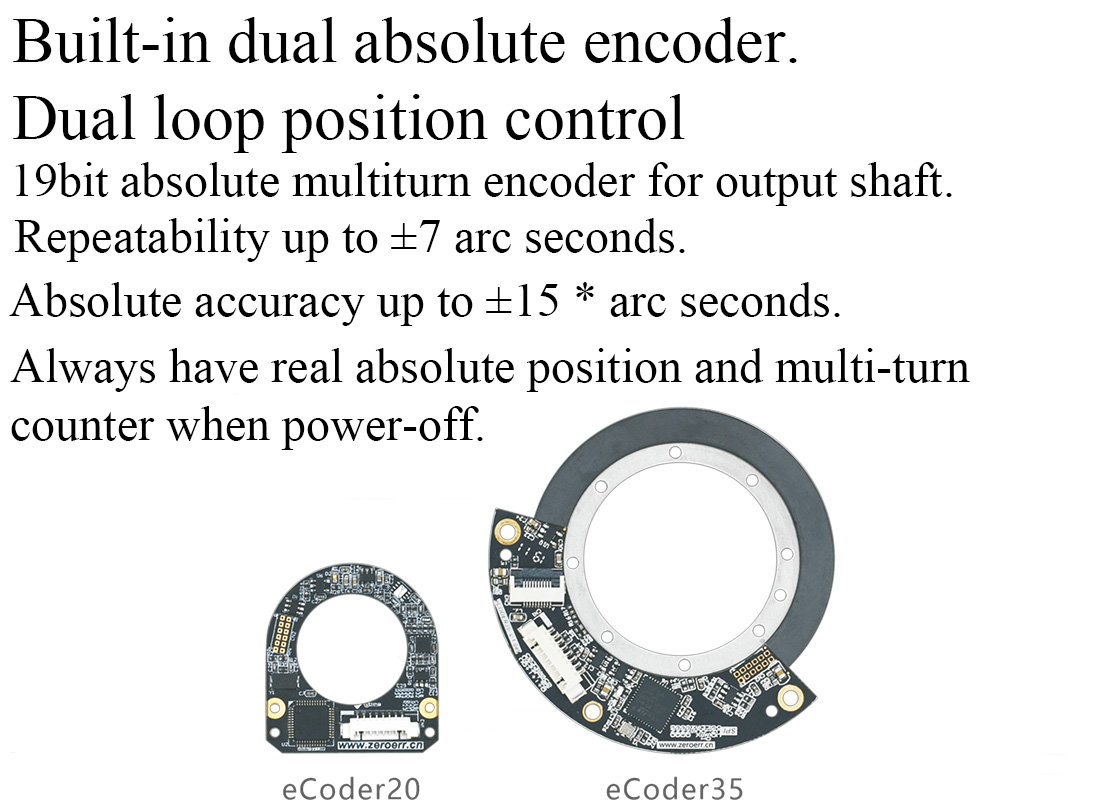
The module features a built-in dual absolute encoder system that enables dual-loop position control, improving motion accuracy and stability. The output shaft is equipped with a 19-bit absolute multi-turn encoder for precise position tracking.
Dual absolute encoder with dual-loop control
19-bit absolute multi-turn encoder on output shaft
Repeatability up to ±7 arc seconds
Absolute accuracy up to ±15 arc seconds
Maintains real absolute position and multi-turn count after power-off
The integrated friction brake ensures smooth and stable braking performance while enhancing system safety. Its design eliminates gaps and backlash, improving positioning accuracy and reliability.
Smooth and stable braking performance
No gap and no backlash design
No movement required during power-on
Low wear and long service life
Can be used as an emergency stop mechanism
| Model | eRob110HXXT | ||||
| Strain wave gear-ratio | 25-50 | 25-80 | 25-100 | 25-120 | 25-160 |
| Peak torque for start and stop (Nm) | 127 | 178 | 204 | 217 | 229 |
| Permissible max. value at average load torque (Nm) | 72 | 113 | 140 | 140 | 140 |
| Rated torque (Nm) | 51 | 82 | 87 | 87 | 87 |
| Permissible maximum momentary torque (Nm) | 242 | 332 | 369 | 395 | 408 |
| Max. output rotational speed (RPM) | 60 | 37.5 | 30 | 25 | 18.75 |
| Motor power (W) | 750 | ||||
| Outer diameter * length | 116*147.5mm | ||||
| Weight (KG) | 4.64 |



 中文
中文